 Fraunhofer Institute for Technological Trend Analysis INT
Fraunhofer Institute for Technological Trend Analysis INTA world without robots is hard to imagine today. Even if they are rare in the lives of most people, industrial robots have long been an essential part of our world, in assembling autos or smartphones, for example. They are finding more use in other areas too, such as in medicine and health care, or as service robots in our homes or restaurants. However, they have one major disadvantage when they come into direct contact with people – they have a hard structure, and that can cause injury. This is where soft robots come in – robots made partially or wholly of compliant material, based on biological systems. The long term concept is to revolutionize the co-existence of man and machine.
In future, soft robots could be used for purposes such as search and rescue operations in inaccessible terrain, support in caring for the aged, handling sensitive devices, or in rehabilitation – forming limbs, for example. Soft robots not only have plus points when interacting with people: because of their flexibility, they can be used as diagnosis and service robots in narrow tunnels and pipes, or in space. Ideally, such robots are not just compliant, they can also even carry out an instruction to self-degrade. To this end, they have to be constructed of compounds that decompose relatively easily through physical (e.g. temperature), chemical (e.g. acid), or biological influences (e.g. microorganisms), degrading into physiologically and ecologically harmless products. This would make them ideal for tasks in monitoring the environment, such as detecting heavy metals in water. Especially interesting for industry are hybrid systems for collision-tolerant robots that consist of both soft and rigid elements – systems that facilitate cooperation between workforce and machines.
Research in soft robots is a highly interdisciplinary field that calls for expertise in computer science, materials science, bionics and mechanical engineering. The goal is the utmost flexibility of all technical equipment such as sensors and actuators, control computers, power supply and communications devices. Smart materials such as shape memory alloys or dielectric elastomers are intended for use as artificial muscles, for flexible organic electronics and sensors, as well as for the energy supply.
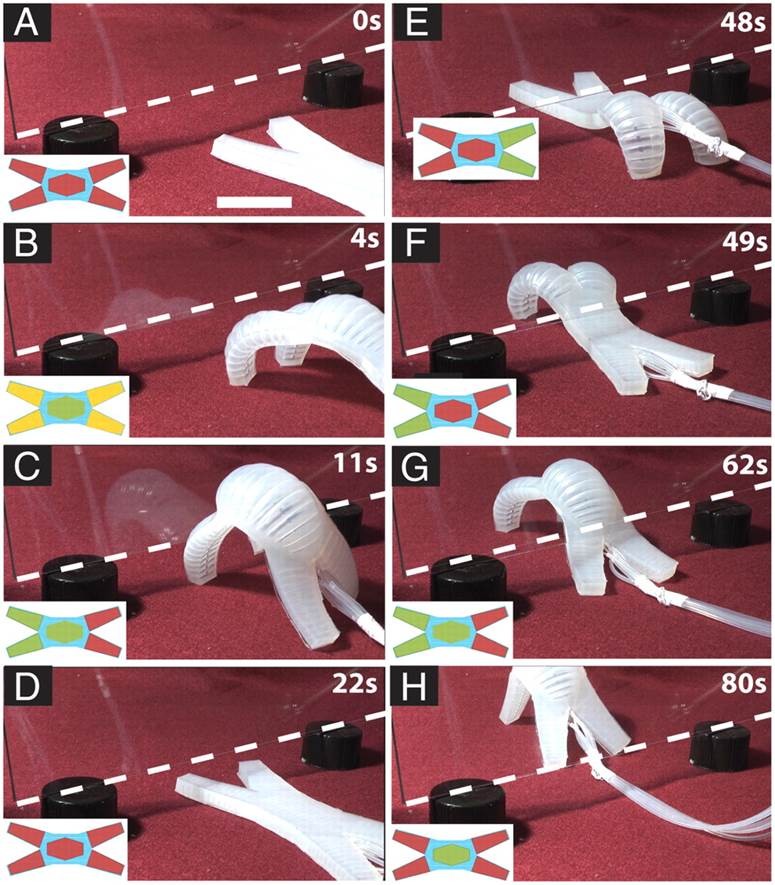
The first key steps in developing soft robots have been taken, and we can reckon with further developments continuing in the technology. Among the demonstration models that show state-of-the-art design possibilities in soft robots are X-shaped crawler robots, caterpillar-like soft robots, fish and ray-like robots, and hand-like structures and grippers with mostly three to six fingers. A major breakthrough on the mass market is still round the corner, but the economic potential is immense.